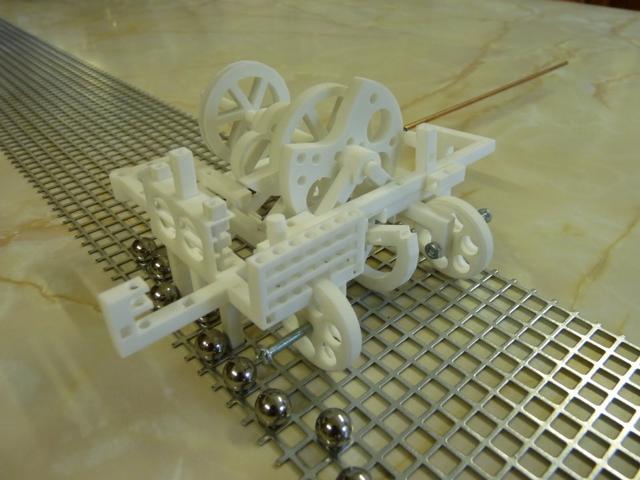
Work on the Turing machine continues steadily, but in the meantime I have been working on a backup plan for Maker Faire. Since I have a fair amount of spare time when I can't get to London Hackspace to do stuff with drills and hacksaws, I started work on a 3D printable automaton. The result is in the video above. It's missing two levers since I plain forgot to include them in the order, and this prevents it from actually computing anything - but this video shows the robot reading input data and altering the output data. When the levers are in place, it'll only move some of the output data, thus doing something interesting.
The input data is the row of ball bearings on the bottom of this video. They're all ones for the purpose of this video. The output data starts off as all zeros, and gets set to ones as the machine moves along. In doing so, the machine calculates the (n+1)th row of a rule 110 cellular automaton (top row) based on the nth row (bottom row).
Although it's a lot simpler than my mechanical Turing machine, it does exactly the same function - but it needs replacing manually at the end of each row (generation). Moving in only one direction is a really big deal, and makes everything much simpler.
Both this and the Turing machine will be on display at Maker Faire UK next weekend in Newcastle (12th & 13th March). At least one of them will be working, but sadly I've had to forego steam power in order to run it indoors.